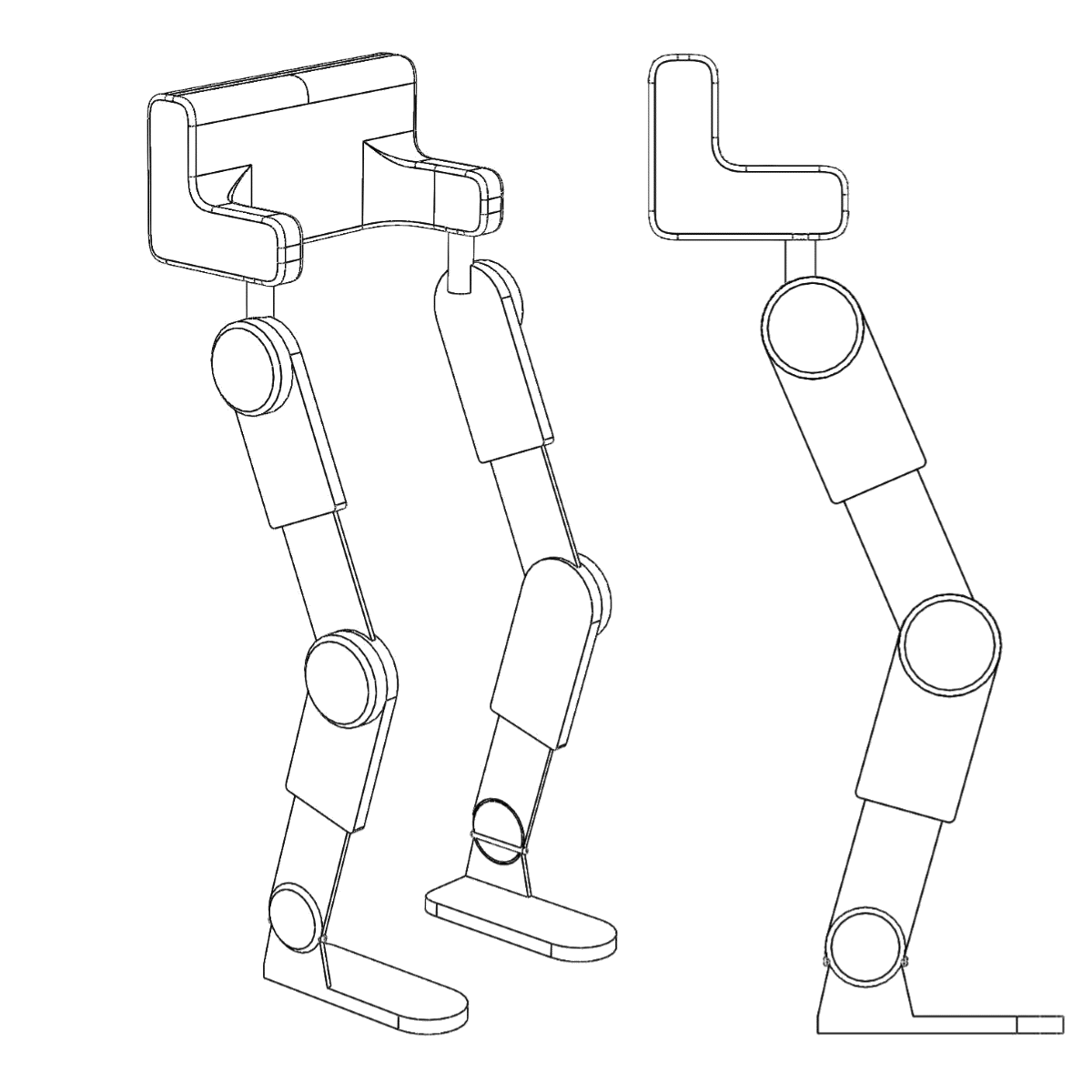
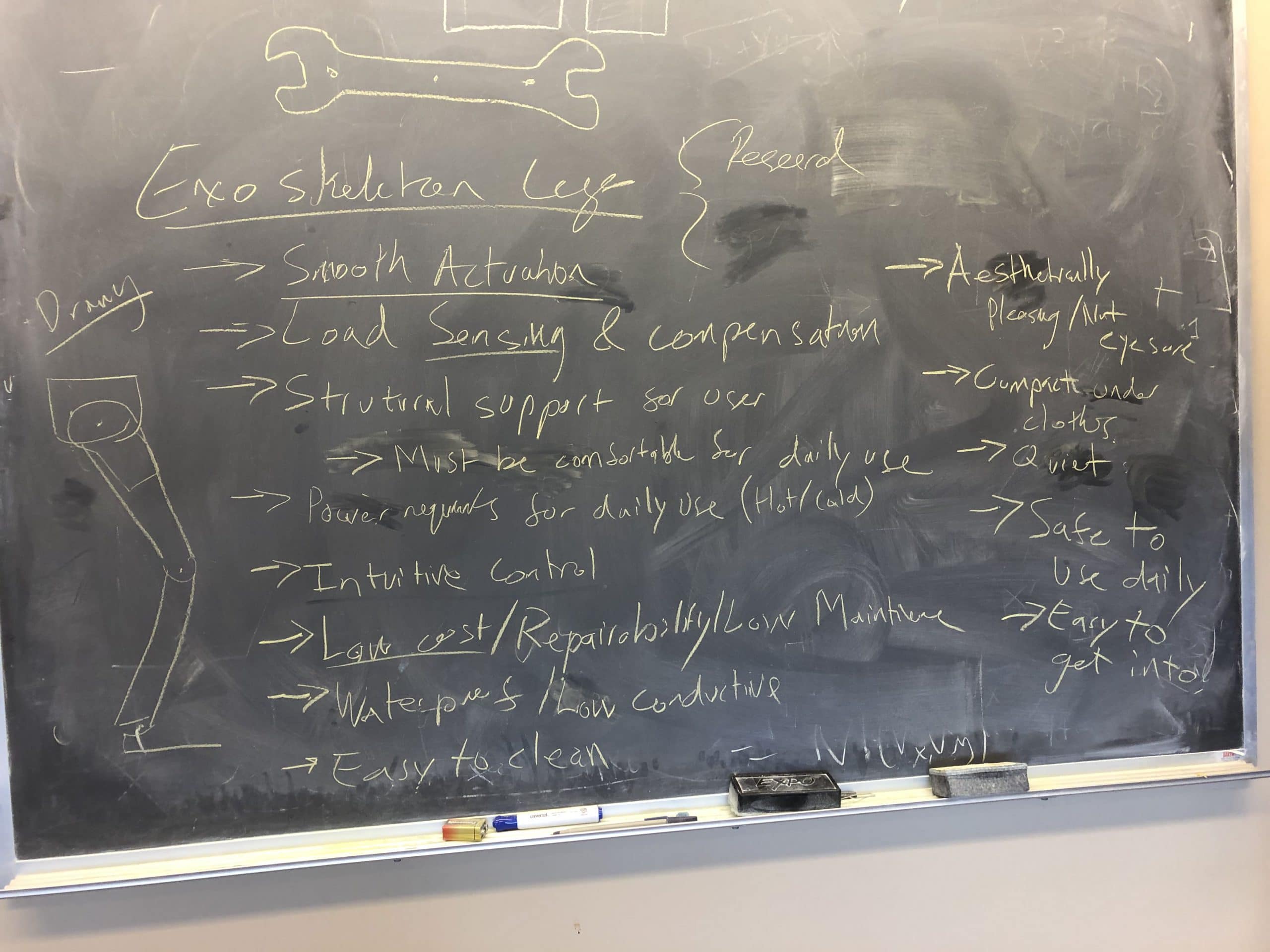
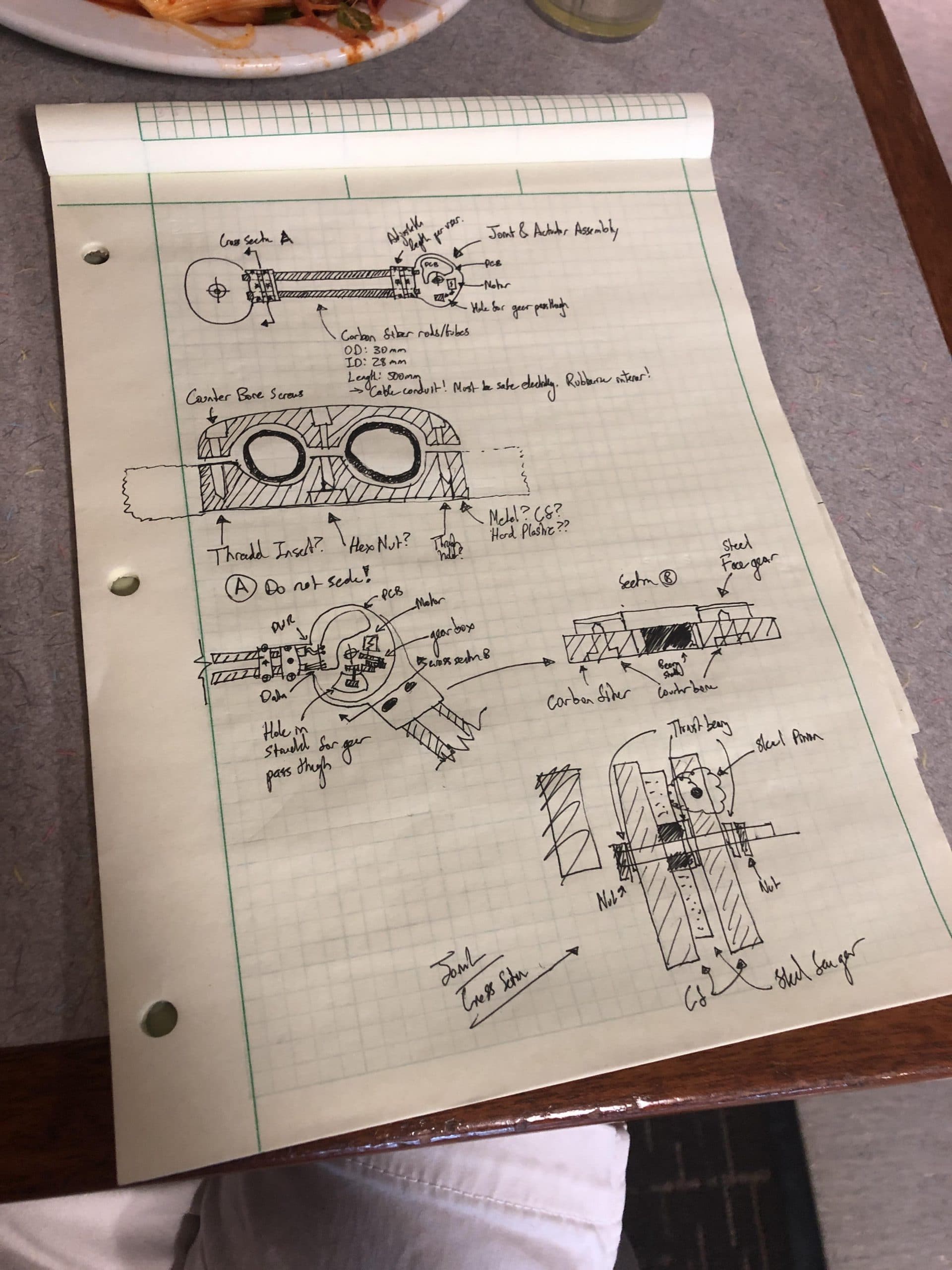
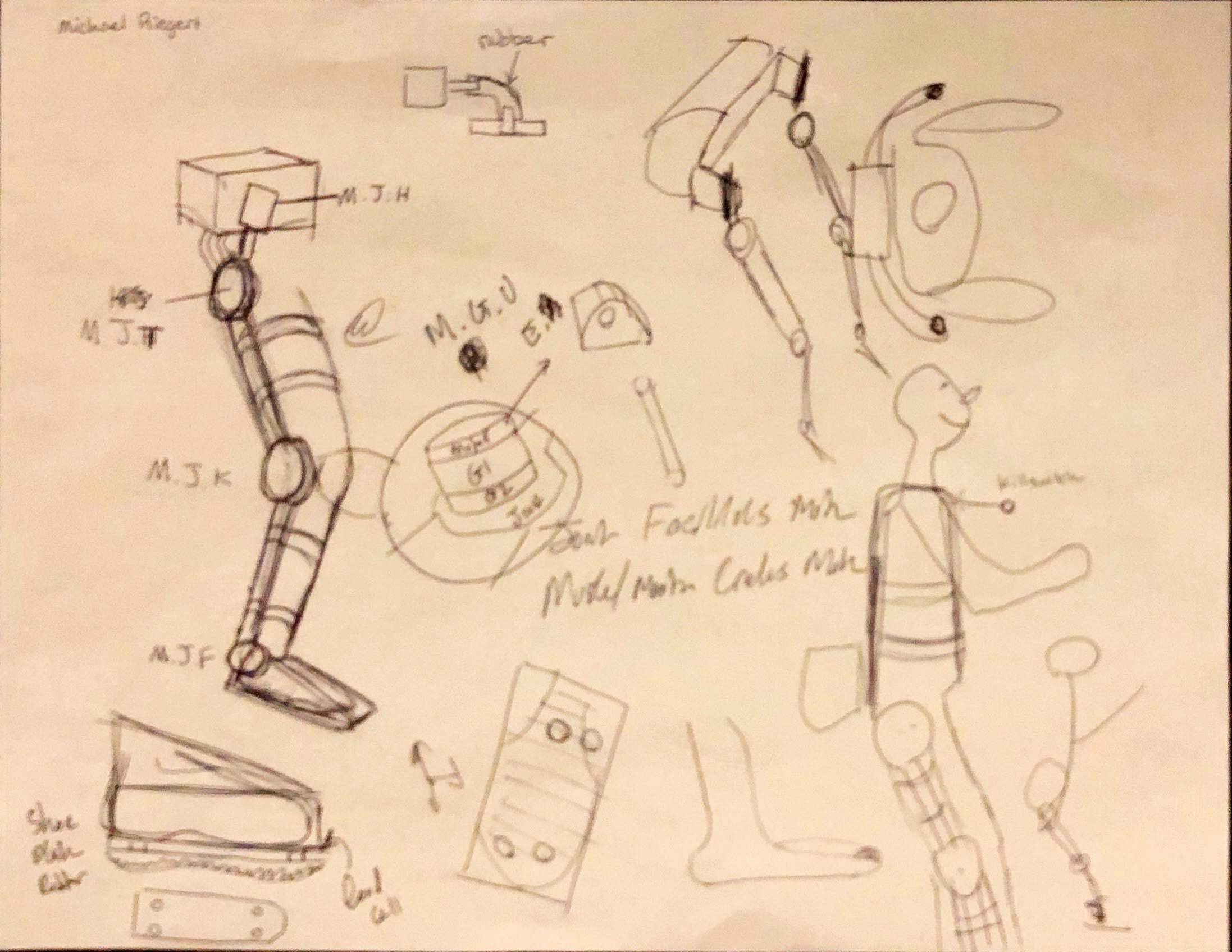
Project Strydr was established by Kenneth Meyerson in 2019 for his undergraduate senior capstone project at Tufts University. The scope of the original project focused on the development of an intelligent actuator from the ground up. Over the course of the year, Strydr grew from a solitary actuator to the foundations of a Lower Limb Exoskeleton.
Project Strydr™ was developed for fun to pursue a monumental challenge and is a product of its time and limitations.
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}